Matemáticas para las artes
Álgebra de conjuntos
Entenderemos por un conjunto como una colección de elementos. A lo largo del documento identificaremos a un conjunto con una letra mayúscula cursiva, y sus elementos estarán comprendidos entre corchetes separados por una coma. Por ejemplo, \[ \mathcal{C} = \{2, 4, 6, 7, 9, 13 \}. \] Para indicar que un elemento pertenece a un conjunto se empleará el símbolo \(\in,\) y con el símbolo \(\notin\) indicaremos la situación contraria. Por ejemplo, para el conjunto \(\mathcal{C}\) se verifica que \(2 \in \mathcal{C}\) y que \(5 \notin \mathcal{C}.\)
Un conjunto \(\mathcal{A}\) será un subconjunto de un conjunto \(\mathcal{B},\) en notación \(\mathcal{A} \subset \mathcal{B},\) si todo elemento de \(\mathcal{A}\) es un elemento de \(\mathcal{B}.\) Por ejemplo, si \(\mathcal{A} = \{ 2,9,13 \}\) note que \(\mathcal{A} \subset \mathcal{C}.\)
De manera natural podríamos pensar que dos conjuntos \(\mathcal{S}\) y \(\mathcal{T}\) son iguales si tienen los mismos elementos, es decir \(\mathcal{S} \subset \mathcal{T}\) y \(\mathcal{T} \subset \mathcal{S}.\)
Para dejar clara la posibilidad de que un conjunto es un subconjunto de si mismo, se emplea el símbolo \(\subseteq\) y se deja el símbolo \(\subset\) para referirse al caso de un subconjunto que no coincide con el mismo conjunto, o en otras palabras a un subconjunto propio del conjunto. De acuerdo con esto se podría escribir \(\mathcal{A} \subseteq \mathcal{P},\) pero es recomendable en este caso escribir \(\mathcal{A} \subset \mathcal{P},\) ya que \(\mathcal{A}\) es un subconjunto propio de \(\mathcal{P}.\)
Se representa con el símbolo \(\emptyset\) al conjunto que carece de elementos, y se entiende que dicho conjunto es un subconjunto de todo conjunto. En nuestro caso por ejemplo \(\emptyset \subset \mathcal{P}.\)
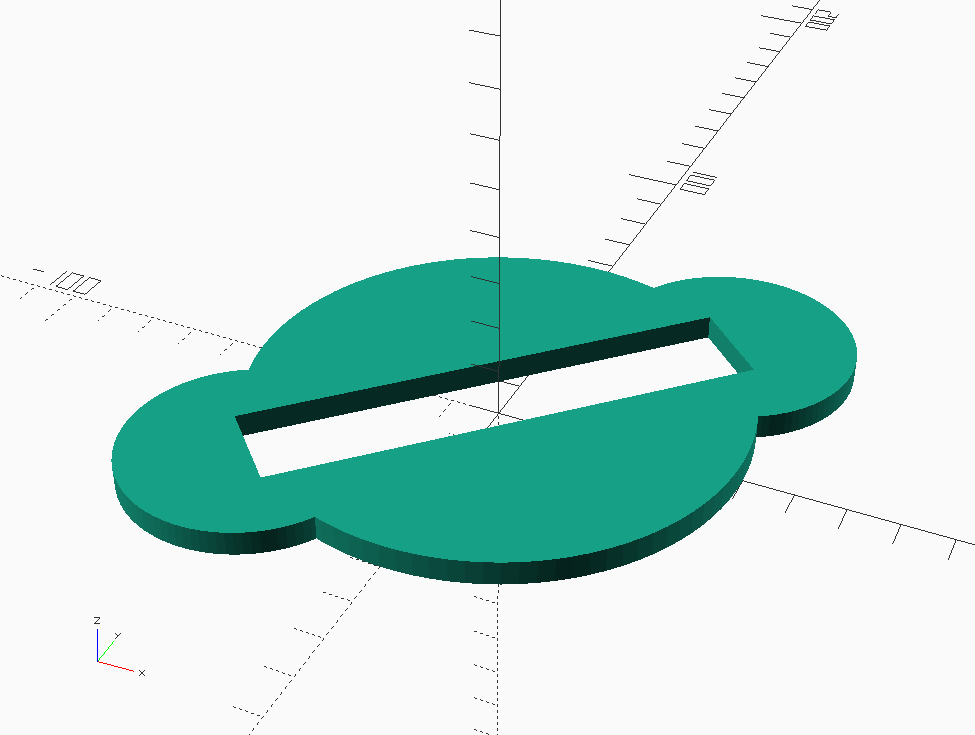
Con el siguiente código en OpenSCAD unimos tres cilindros, uno central de radio 50 y dos laterales cuyos centro se han localizado en los punto \(A(25 \sqrt{2}, 25 \sqrt{2})\) y \(B(-25 \sqrt{2}, -25 \sqrt{2})\). Después a la estructura total le hemos sustraido un rectángulo de dimensiones \(100\) unidades en \(x\) y \(20\) unidades, el rectángulo se ha ratado \(45^{\circ}\) a favor de las manecillas de reloj.
$fn = 100;
linear_extrude(5){
difference(){
union(){
circle(50);
translate([50*sqrt(2)/2,50*sqrt(2)/2,0]){
circle(25);
}
translate([-50*sqrt(2)/2,-50*sqrt(2)/2,0]){
circle(25);
}
}
rotate([0, 0, 45]){
square([100, 20], center = true);
}
}
}
Números reales
Supongamos la existencia de un conjunto de números denotado con \(\mathbb{R}\) (números reales) que verifican los siguientes axiomas 1
ax1. leyes conmutativas \[ x + y = y + x, \quad x \cdot y = y \cdot x \]
ax2. leyes asociativas \[ x + (y + z) = (x + y) + z, \quad x\cdot(y \cdot z) = (x \cdot y) \cdot z \]
ax3. ley distributiva \[ x \cdot ( y + z) = x \cdot y + x \cdot z \]
ax4. Dados dos números reales \(x\) e \(y\) existe siempre un número real \(z\) tal que \(x + z = y.\) Dicho número se representa por \(y - x.\) En un caso particular, el número \(x - x\) se representa con \(0.\) Se escribe \(-x\) en lugar de \(0 - x\) y este número es conocido como el opuesto de \(x.\)
ax5. Para dos números reales \(x, y\) con \(x \neq 0\) existe un número real \(z\) tal que \(x \cdot z = y.\) Dicho número se representa con \(y / x.\) En el caso particular, el número \(x/x\) se representa con con \(1.\) Se acostumbra escribir \(x^{-1}\) en lugar de \(1/x,\) y a \(x^-1\) se le conoce como el inverso de \(x.\)
ax6. Se verifica una y sólo una de las relaciones \(x = y,\) \(x < y,\) \(x > y.\)
ax7. Si \(x < y\) entonces para cada \(z\) se verifica que \[ x + z < y + z \]
ax8. Si \(x > 0\) y \(y > 0\) entonces \(x \cdot y > 0.\)
ax9. Si \(x > y\) e \(y > z\) entonces \(x > z.\)
Un número real \(x\) es llamado positivo si \(x > 0,\) y es llamado negativo si \(x < 0.\) La notación \(x \leq y\) se emplea para abreviar la afirmación \[ x < y \quad \text{ ó } \quad x = y. \]
Note que si \(x > 0\) entonces \(-x < 0.\) En efecto, si \(-x > 0\) teniendo en cuenta que \(x > 0\) entonces \[ -x + x > 0 + x, \] con lo que \(0 > x\) lo que no es posible, ya que \(x > 0.\) De manera equivalente puede probarse que si \(-x > 0\) entonces \(x < 0.\)
- ax10. Todo conjunto no vacío \(A\) de números reales acotado superiormente admite un supremo.
Recta numérica
Una forma de representar el conjunto de los números reales es empleando la recta numérica. Sobre esta podemos identificar el cero y al lado derecho de este los números positivos mientras que a la lado izquierdo los negativos. Los axiomas de orden sobre la recta numérica se relacionan de la siguiente manera: un número \(a\) es mayor que otro número \(b,\) es decir \((a > b)\) si \(a\) se encuentra localizado sobre la recta a la derecha de \(b.\)
Sobre la recta numérica la suma de dos números reales tiene una interesante interpretación. Si \(a\) es un número real y \(b\) es un número positivo, entonces la suma de \(a + b\) corresponde con el desplazar \(b\) unidades el número \(a\) a la derecha.
Veamos un ejemplo en donde se emplean las propiedades de los números reales, para encontrar el valor numérico de una variable.
Propiedades de los exponentes
Una forma de reducir la escritura del múltiple producto del número \(a\) consigo mismo n-veces es \[ a^n = \underbrace{a \cdot a \cdots a}_{\text{ $n$-veces}}. \] De acuerdo con esto, se puede probar que para dos enteros positivos \(m\) y \(n\) se cumple \[ a^{m} \cdot a^{n} = a^{m + n} \, \text{ y que } \, \left( a^{m} \right)^n = a^{m n}. \] Por otro lado, como una consecuencia de los axiomas de los números reales entenderemos que \[ \left( a^n \right)^{-1} \equiv a^{-n} \equiv \frac{1}{a^n}. \] Es importante mencionar que las expresiones anteriores se pueden extender para cualquier número real en el exponente de \(a.\)
Notación científica
La notación científica es un número en la forma \(M \times 10^k\) en donde \(M\) es un número decimal con parte entera distinta de cero, y \(10^k\) se conoce como el orden de magnitud siendo \(k\) un número entero.
Por ejemplo, el número 0.0000401 se puede escribir en notación científica como \(401 \times 10^{-7}.\)
Cantidades proporcionales
Diremos que dos cantidades \(x\) e \(y\) son directamentamente proporcionales, en notación \(x \propto y,\) si existe una constante \(k \neq 0\) tal que \[ x = k y. \]
Por otro lado, diremos que \(x\) e \(y\) son inversamente proporcionales si \(x\) es directamente proporcional a la cantidad \(1/y.\) Es decir, existe una constante \(k \neq 0\) tal que \[ x = k \frac{1}{y}. \]
En los siguientes ejemplos las cantidades empleadas mantienen una relación directa o inversa de proporcionalidad.
Factores de conversión
En muchas ocasiones la información de un problema combina datos en distintos tipos de escalas, por lo que se hace necesario contar con un mecanismo que permita poder operar de forma uiforme la información suministrada, y la mejor forma de conseguir esto es identificar la relación que existe entre una escala y otra.
Cambios de escala
En el contexto de escalas y proporciones, la notación \(a:b\) se emplea para expresar la relación entre dos cantidades y significa que por cada \(a\) unidades de la primera cantidad, hay \(b\) unidades de la segunda cantidad. Por ejemplo, una proporción de \(3:4\) significa que por cada 3 unidades de la primera cantidad, hay 4 unidades de la segunda cantidad. o por ejemplo, en el caso de un dibujo una escala de \(1:100\) indica que 1 cm en el dibujo representa \(100 cm\) (o \(1 m\)) en la realidad, y de manera inversa, \(n:1\) significa que \(n\) unidades en el dibujo, plano o modelo representan 1 unidad en la realidad.
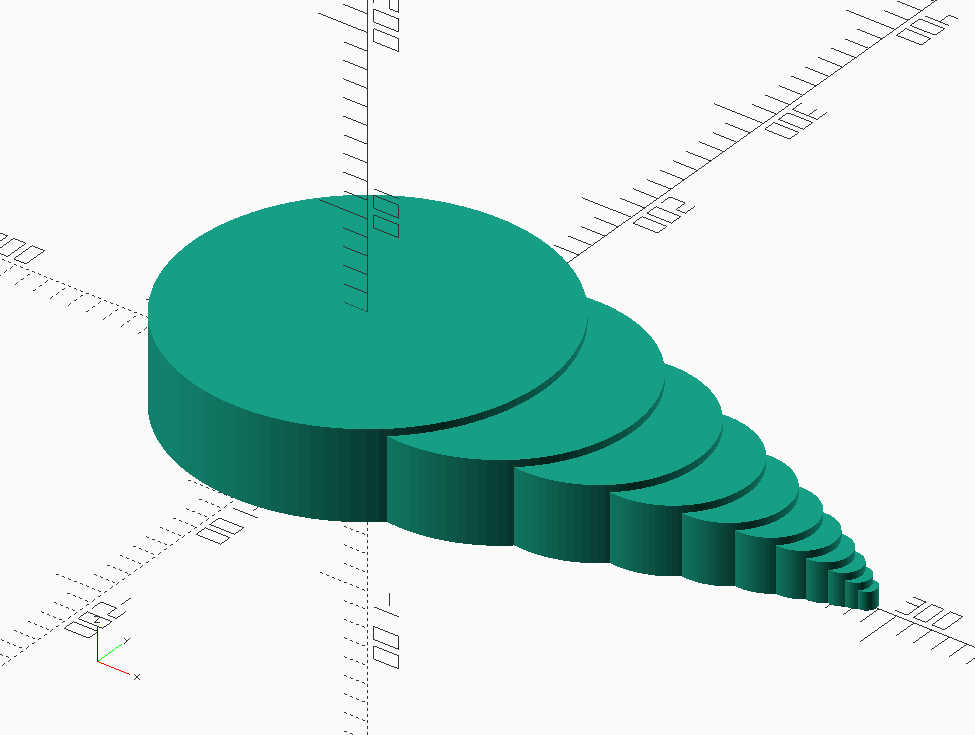
Con el siguiente código elaboramos en OpenSCAD una secuencia decreciente de cilindros cuyos radios diminuyen en una relación de \(0.75\) del radio anterior. La altura de los cilindros disminuye también en cada cilindro \(4\) unidades con respecto del anterior.
$fn=100;
/*
Radio de la circunferencia inicial
*/
r = 100;
/*
Una función para realizar la suma de
los elementos de una lista.
*/
function suma(lista, c = 0) =
c == 0 ? lista[c]:
lista[c] + suma(lista, c - 1);
/*
Una función que alimenta una lista con
la suma de la secuencia de los radios
que se están disminuyendo o aumentando
en relación a un factor
*/
f = 0.75;
function radios(n) =
[for (k = [0:n]) f^k];
for (k=[0:10]){
translate([r*( suma(radios(k), k) - 1),0,0]){
linear_extrude(50 - 4*k)
circle(r*f^k);
}
}
Plano cartesiano
El plano cartesiano es un sistema de referencia dos dimensional empleado para representar puntos, líneas y figuras geométricas. Este plano está compuesto por dos ejes perpendiculares entre sí, uno horizontal, denominado eje \(x\) y otro vertical conocido como eje \(y\). Ambos ejes se intersectan en un punto denominado origen, que tiene coordenadas \(\mathcal{O} = (0,0)\)
Cada punto en el plano cartesiano se representa mediante un par ordenado de números \((x,y)\) en donde \(x\) indica la posición en el eje horizontal y \(y\) la posición en el eje vertical.
Los puntos en el plano los identificaremos con una letra mayúscula, por ejemplo el punto \(P(a,b)\) corresponde al punto \(P\) cuyas componentes son \((a,b).\) Es bien conocido que por dos puntos pasa una y sólo una recta, y estás las identificaremos con dos puntos sobre esta o con una letra minúscula a su lado. Si los puntos \(A\) y \(B\) pertenecen a la recta, esta se denota por \(\overleftrightarrow{AB}\).
Definición 1 Dos o más puntos son colineales si pertenecen a la misma recta. Dos rectas que se encuentran en el plano cuya intersección es el conjunto vacío son llamadas rectas paralelas. Para escribir que una recta \(l\) es paralela a una recta \(s\) se empleará la notación \(l \parallel s.\)
Definición 2 La parte de la recta \(l\) entre los puntos \(A\) y \(B\) se llama segmento \(AB,\) este se denota por \(\overline{AB}.\) Los puntos \(A\) y \(B\) se conocen como los puntos extremos del segmento.
Emplearemos la notación \(\vert \overline{AB} \vert\) para referirnos a la longitud del segmento \(\overline{AB}\) y se empleará la notación \(d(A,B)\) para referirse a la distancia entre los puntos \(A\) y \(B.\) En particular note que \(d(A,B) = d(B,A) = \vert \overline{AB} \vert.\)
Para dos puntos en el plano cartesiano digamos \(A(x_0, y_0)\) y \(B(x_1, y_1)\) la distancia entre \(A\) y \(B\) est'a dada por la expresión \[ d(A,B) = \sqrt{(x_1 - x_0)^2 + (y_1 - y_0)^2}. \tag{1}\]
Definición 3 Un punto \(C\) se encuentra entre los puntos \(A\) y \(B\) si \(A,\) \(B\) y \(C\) son puntos distintos sobre la misma recta y \(\vert \overline{AC} \vert + \vert \overline{CB} \vert = \vert \overline{AB} \vert.\) Una forma equivalente de escribir esta última expresión es \(d(A,C) + d(C,B) = d(A,B).\) Si \(C\) se encuentra entre \(A\) y \(B,\) y \(d(A,C)=d(C,B)\) entonces \(C\) es el punto medio del segmento \(\overline{AB},\) y en este caso se dice que \(C\) biseca el segmento \(\overline{AB}.\)
Definición 4 Sean \(A\) y \(B\) dos puntos de la recta \(l.\) El conjunto de todos los puntos de \(l\) que se encuentran del mismo lado de \(A\) pasando por \(B,\) incluido \(A,\) se denomina rayo y lo denotamos por \(\overrightarrow{AB}.\) Se dice que \(\overrightarrow{BA}\) y \(\overrightarrow{BC}\) son rayos opuestos si \(A,\) \(B\) y \(C\) son puntos colineales y \(B\) se encuentra entre \(A\) y \(C.\)
Rayos y segmentos paralelos entre sí, son subconjuntos de rectas paralelas. Con base a esto se escribirá por ejemplo, \(\overline{AB} \parallel \overline{CD}\) si se quiere decir que el segmento \(\overline{AB}\) es paralelo al segmento \(\overline{CD}.\)
Ángulos y rectas perpendiculares
En esta sección se introduce los conceptos de ángulo y de rectas perpendiculares.
Definición 5 Un ángulo es la unión de dos rayos que tienen el mismo punto extremo. Los rayos se llaman lados del ángulo y su punto extremo común recibe el nombre de vértice del ángulo.
Los ángulos comúnmente se presentan con el símbolo \(\angle\) seguido de tres letras, la primera y la última corresponden a puntos sobre los lados del ángulo y la segunda letra corresponde al vértice. Otra manera de representar ángulos es emplear el símbolo \(\angle\) seguido de su vértice. También podemos representar un ángulo por medio de una letra minúscula romana o griega.
La medida del ángulo \(\angle ABC\) se representará con \(\vert \angle ABC \vert\) cuya unidad es el grado sexagesimal. Un ángulo es llamado si su medida es de \(90^\circ.\) Un ángulo es llamado si su medida es menor a \(90^\circ,\) y se dice si su medida es mayor a \(90^\circ\).
Definición 6 Dos ángulos son adyacentes si tienen un mismo vértice y un lado común.
Dos ángulos son opuestos por el vértice si corresponden a los ángulos no adyacentes formados por dos rectas que se intersectan.
Los ángulos que tienen la misma medida se llaman ángulos congruentes. La bisectriz de un ángulo es el rayo cuyo punto extremo es el vértice del ángulo y el cual divide el ángulo en dos ángulos congruentes 2
Definición 7 Dos rectas son perpendiculares si su intersección forma un ángulo recto. Escribiremos \(l \perp s\) para representar que la recta \(l\) es perpendicular a la recta \(s.\) Rayos y segmentos son perpendiculares si son subconjuntos de rectas perpendiculares.
La distancia de un punto a una recta es la medida del segmento perpendicular que va del punto a la recta. La distancia de un punto \(P\) a la recta \(l\) se denotará con la expresión \(d(P,l).\)
### Rectas en el plano En esta sección encontraremos la ecuación de la recta empleando el invariante geométrico llamado pendiente. Entendiendo por invariante geométrico una cantidad que se conserva para todo punto en la estructura, toda estructura tiene infinitos invariantes geométricos.
Definición 8 Dado dos puntos \(A(x_0,x_1)\) y $B(y_0,y_1) $ con \(x_0 \neq x_1\) definimos la pendiente como el cociente \[ m=\frac{y_1-y_0}{x_1-x_0} \] Note que en particular la pendiente indica la inclinación de la recta, en ese sentido si la pendiente es positiva la pendiente es creciente en el sentido de las \(x\), si es negativa es decreciente y si es cero no tiene inclinación.
Debido a que la pendiente es un invariante geométrico de la recta, para encontrar la ecuación de una recta, simplemente reemplazamos cualquier punto con el que hayamos la pendiente por un punto arbitrario \((x,y)\)
Es importante mencionar que un punto \(P(p_1,p_2)\) pertenece a la recta si este punto satisface a la ecuación de la recta.
Definición 9 Dos rectas \(l\) y \(s\) en un mismo plano son paralelas, \(l \parallel s\), si estas no se cortan. Rectas paralelas tienen pendientes iguales.
Definición 10 Dos rectas \(l\) y \(s\) son perpendiculares, \(l \perp s\), si se cortan formando un ángulo de \(90\) grados (\(\pi/2\) radianes). El producto de pendientes de rectas perpendiculares es \(-1.\)
Ejemplo 8 Considere los puntos \(A(1,2)\), \(B(-3,-1)\) y \(C(-1,5)\)
- Encuentre la ecuación de la recta \(l\) que pasa por los puntos \(A\) y \(B.\)
- Encuentre la ecuación \(s\) paralela a \(l\) que pasa por el punto \(C.\)
- Encuentre la ecuación \(t\) perpendicular a \(l\) que pasa por el punto \(C.\)
Solución
- Se puede probar que la pendiente de la recta \(l,\) es \(m_l = 3/4,\) y de acuerdo con esto la ecuación de esta recta es \[ 3x-4y=-5. \]
- Como la recta \(s\) es paralela a \(l,\) entonces las pendientes de estas rectas son iguales, es decir \(m_s = 3/4\) y de acuerdo con esto la ecuación de esta recta es \[ 3x-4y=-23. \]
- Como la recta \(t\) es perpendicular a \(l,\) entonces el producto de sus pendientes debe ser \(-1,\) de acuerdo con esto \(m_t = -4/3,\) y se puede probar que la ecuación de esta recta es \[ 4x + 3y = 11. \]
Definición 11 (Punto de corte entre dos rectas) Un punto que es común para las rectas \(l\) y \(s\) es llamado punto de corte de las rectas. Un punto de corte satisface las ecuaciones de las rectas de manera simultánea.
Ejemplo 9 Una recta \(l\) pasa por los puntos \(A(-2,1)\) y \(B(3,-2)\), mientras que la recta \(s\) pasa por los puntos \(C(-1,-3)\) y \(D(5,1)\), Encuentre las ecuaciones de las rectas \(l\) y \(s\) y su punto de corte si este existe.
Solución
Puede probarse que la ecuación de la recta \(l\) es \[ 3x+5y=-1 \] y que la ecuación de la recta \(s\) es \[ -4x + 6y =-14 \] Para determinar el punto de corte de las rectas \(l\) y \(s,\) resolveremos el siguiente sistema de ecuaciones. \[ \begin{cases} 3x+5y=-1 \\ -4x + 6y =-14 \end{cases} \tag{2}\] Vamos a multiplicar la primera ecuación de 2 por \(6\) y la segunda por \(-5\) de manera que al sumar ambas expresiones se elimine la variable \(y,\) de acuerdo con esto obtenemos. \[ 38x=64 \to x=\frac{32}{19}. \] Vamos multiplicar la primera ecuación de 2 por \(4\) y la segunda ecuación por \(3\) de manera que al sumar ambas expresiones se elimine la variable \(x,\) de acuerdo con esto obtenemos. \[ 38y=-46 \to y= \frac{-23}{19} \] El punto de corte entre ambas rectas sería \(P(32/19 , -23/19)\).
Introducción a la geometría vectorial en el plano
En esta sección haremos una breve presentación de la aritmética vectorial y su aplicación en la geometría del plano. La sección se ha divido en dos partes. En la primera parte se introduce el concepto de vector en el plano, su interpretación geométrica y operaciones entre estos. En la segunda se presenta la ecuación vectorial y paramétrica de una recta y la distancia de un punto a una recta de manera vectorial.
Aritmética vectorial
Definición 12 (Vector) Un vector es un arreglo o una lista de números reales, Los vectores los identificamos con una letra mayúscula o minúscula y en este ultimo caso con una flecha encima de esta. Los números reales del vector son llamados componentes y se enumeran de izquierda a derecha partiendo desde uno, el número de componentes del vector se conoce como la dimensión del vector
Un vector de dimensión 2 es una pareja de números reales \(a_1\) y \(a_2\) dispuestos en una fila o una columna. Cada uno de estos números recibe el nombre de coordenada o componente del vector.
El conjunto de todos los vectores en el plano se denota \(\mathbb{R}^2\). Los vectores se representan con una letra mayúscula, o con una letra min'uscula y una flecha en la parte superior de esta, es decir:
\[ A = (a_1, a_2), \quad \overrightarrow{a} = (a_1, a_2). \]
Definición 13 Dos vectores \(A\) y \(B\) de \(\mathbb{R}^2\) son siempre y cuando sus componentes coincidan. Es decir, si \(A = (a_1, a_2)\) y \(B = (b_1, b_2),\) diremos que \(A = B\) si \(a_{1} = b_{1}\) y \(a_2 = b_2\).
La suma \(A + B\) de dos vectores se define como el vector que se obtiene de sumar componente a componente de \(A\) y \(B,\)
\[ A + B = (a_1 + b_1, a_2 + b_2). \]
También se puede representar geométricamente la suma de los vectores \(A+B\) realizando el siguiente procedimiento, trazamos una linea punteada desde el vector \(A\) paralela al vector \(B\) y trazamos desde el extremo de \(B\) una linea punteada paralela al vector \(A\), el punto de corte entre estas lineas coincide con el extremo del vector \(A+B\).
Si \(\alpha\) es un número real (escalar), se define \(\alpha A\) como el vector que se obtiene al multiplicar \(\alpha\) por cada componente de \(A,\) \[ \alpha A = (\alpha a_1, \alpha a_2). \]
Con base a esta definici'on se desprende de manera inmediata que la suma de vectores es conmutativa y asociativa. Se sigue también que la multiplicación por escalares es asociativa y verifica dos leyes distributivas, esto es
\[ \alpha(A + B) = \alpha A + \alpha B, \quad (\alpha + \beta)A = \alpha A + \beta A, \]
con \(A\) y \(B\) elementos de \(\mathbb{R}^2,\) \(\alpha\) y \(\beta\) escalares.
Definición 14 El vector cuyas componentes son \(\mathcal{O}\) se conoce como el vector nulo y se representa como \(\mathcal{O},\) es decir \(\mathcal{O} = (0, 0).\)
El vector nulo verifica \(A + \mathcal{O} = A.\) El vector \((-1)A\) se representa por \(-A\) y comúnmente se conoce como el opuesto de \(A\) el cual satisface \(-A + A = \mathcal{O}.\) Se acostumbra a escribir \(A - B\) en lugar de \(A + (-1)B.\)
Existe una identificación natural entre el vector \(A = (a_1, a_2)\) y el punto \(A(a_1, a_2)\) del plano cartesiano, lo cual permite interpretar geométricamente el vector como el segmento de recta dirigido del origen al punto. Esta identificación nos permitirá referirnos en ciertos contextos a puntos y vectores de manera indistinta.
En general un par de puntos \(A\) y \(B\) del plano cartesiano se denomina vector geométrico si un punto es el punto inicial del vector (suponga \(A\)) y el otro punto es el extremo final del vector (suponga \(B\)). Este vector se representa como \(\overrightarrow{AB}\) y se entiende como el segmento de recta dirigido del punto \(A\) al punto \(B.\) Más aún, si \(A(a_1, a_2)\) y \(B(b_1, b_2),\) entonces \(\overrightarrow{AB}\) tiene componentes \((b_1 - a_1, b_2 - a_2)\).
Definición 15 Dos vectores \(A\) y \(B\) de \(\mathbb{R}^2\) son vectores paralelos si \(B = \alpha A\) para un cierto escalar \(\alpha\) no nulo. Si \(\alpha\) es positivo, \(A\) y \(B\) tienen la misma dirección. Si \(\alpha\) es negativo, \(A\) y \(B\) tienen direcciones contrarias.
Productos interior y exterior
Definición 16 (Producto interior) Sean \(A = (a_1, a_2)\) y \(B = (b_1, b_2)\) son dos vectores de \(\mathbb{R}^2.\) El producto interior o producto punto entre \(A\) y \(B,\) representado por \(A \cdot B\) se define como: \[ A \cdot B = a_1 b_1 + a_2 b_2. \] Note que \(A \cdot B = B \cdot A\)
Teorema 1 Sean \(A,\) \(B\) y \(C\) vectores de \(\mathbb{R}^2.\) Para cualquier escalar \(\alpha\) se verifican las siguientes propiedades:
- \(A \cdot B = B \cdot A.\)
- \(A \cdot ( B + C) = A \cdot B + A \cdot C.\)
- \(\alpha (A \cdot B) = (\alpha A) \cdot B = A \cdot (\alpha B).\)
- \(A \cdot A > 0\) si \(A \neq O.\) \(\quad\) \(A \cdot A = 0\) si y sólo si \(A = O.\)
Prueba. La propiedad 1. es consecuencia de la propiedad conmutativa de las operaciones de los números reales. Demostraremos la propiedad 2. Las propiedades 3. y 4. se proponen como ejercicio.
Considere los vectores \(A = (a_1, a_2),\) \(B = (b_1, b_2)\) y \(C = (c_1, c_2).\)
\[ \begin{align*} A \cdot (B + C) & = a_1 (b_1 + c_1) + a_2 (b_2 + c_2) \\ &= a_1 b_1 + a_2 b_2 + a_1c_1 + a_2c_2 \\ &= A \cdot B + A \cdot C \end{align*} \]
Definición 17 Diremos que dos vectores \(A\) y \(B\) de \(\mathbb{R}^2\) son ortogonales o perpendiculares si \(A \cdot B = 0.\)
Podemos sacar ventaja del producto para definir una rotación, la cual generalizaremos más adelante, de una figura en el plano. Supongamos que tenemos el vector \(A = (a,b),\) entonces el vector \(B = (-b, a)\) es perpendicular a \(A,\) en efecto es claro que \(A \cdot B = 0.\) A este vector \(B\) lo identificaremos con \(A_{\pi/2}\) pues corresponde con una rotación de \(\pi/2\) radianes o \(90^o\) grados en sentido contrario de las manecillas del reloj. De acuerdo con esto se puede probar que si
\[ A = (a,b) \text{ entonces } A_{\pi/2} = (-b, a) \text{ y } A_{-\pi/2} = (b , -a) \]
Definición 18 La longitud o norma de un vector \(A\) se representa como \(\vert \vert A \vert \vert\) y corresponde al número real
\[ \vert \vert A \vert \vert = \sqrt{A \cdot A}. \]
En particular si \(A = (a_1, a_2)\) entonces \(\vert \vert A \vert \vert = \sqrt{a_1^2 + a_2^2}\) y \(\vert \vert A \vert \vert^2 = a_1^2 + a_2^2.\) Note que \(\vert \vert A \vert \vert\) es la distancia del punto \(A(a_1, a_2)\) al origen de coordenadas.
La cantidad \(\vert \vert A-B \vert \vert\) corresponde con la distancia entre el punto \(A\) y el punto \(B\) \((d(A,B))\)
\[ d(A,B) = \vert \vert A-B \vert \vert = \vert \vert B-A \vert \vert = \sqrt{(x_-x_0)^2 +(y_1-y_0)^2} \]
Teorema 2 Sea \(A\) es un vector de \(\mathbb{R}^2\) y \(\alpha\) un escalar, entonces se cumplen las siguientes propiedades:
\(\vert \vert A \vert \vert > 0\) si \(A \neq 0.\) \(\quad\) \(\vert \vert A \vert \vert = 0\) si y s'olo si \(A = O.\)
\(\vert \vert \alpha A \vert \vert = \vert \alpha \vert \, \vert \vert A \vert \vert.\)
Prueba. Demostraremos la propiedad \(ii.\) La propiedad \(i.\) se propone como ejercicio.
Sean \(A = (a_1, a_2)\) y un escalar \(\alpha.\) Entonces,
\[ \begin{align*} \vert \vert \alpha A \vert \vert & = \sqrt{ \alpha^2 a_1^2 + \alpha^2 a_2^2 } \\ &= \sqrt{\alpha^2 ( a_1^2 + a_2^2 )} \\ &= \sqrt{\alpha^2} \sqrt{a_1^2 + a_2^2} \\ &= \vert \alpha \vert \, \vert \vert A \vert \vert. \end{align*} \]
Definición 19 Un vector \(A\) de \(\mathbb{R}^2\) es llamado vector unitario si \(\vert \vert A \vert \vert = 1.\)
Un vector unitario \(A\) comúnmente es denotado como \(\widehat{A}.\) Todo vector \(A\) no nulo de \(\mathbb{R}^2\) puede multiplicarse por un escalar \(\alpha\) de manera que la norma de este nuevo vector \(\alpha A\) sea uno, este escalar es \(1/\vert \vert A \vert \vert.\) En efecto, si \(A = (a_1, a_2)\) la norma del vector \(\frac{1}{\vert \vert A \vert \vert} A,\) de acuerdo con la propiedad \(2.\) en el Teorema 2, es:
\[ \Big\vert \Big\vert \frac{1}{\vert \vert A \vert \vert } A \Big\vert \Big\vert = \frac{1}{\vert \vert A \vert \vert} \vert \vert A \vert \vert = 1. \]
El proceso mediante el cual se multiplica un vector no nulo por un escalar para que el nuevo vector resultante tenga norma igual a uno se conoce como normalización vectorial o simplemente normalizar un vector.
A lo largo de este libro, identificaremos con \(e_1\) y con \(e_2\) a los vectores de norma 1, paralelos a los ejes $x $ e \(y\) respectivamente,
\[ e_1 = (1,0), \quad e_2 = (0,1). \]
Teorema 3 (Teorema de Pitágoras) Si \(A\) y \(B\) son dos vectores perpendiculares, entonces
\[ \vert \vert A - B \vert \vert^2 = \vert \vert A \vert \vert^2 + \vert \vert B \vert \vert^2. \]
Prueba. Note que
\[ \begin{align*} \vert \vert A - B \vert \vert^2 & = (A - B) \cdot (A - B) \\ & = \vert \vert A \vert \vert^2 + 2 A \cdot B + \vert \vert B \vert \vert^2 \end{align*} \]
y la prueba finaliza al emplear la hipótesis de la perpendicularidad de \(A\) y \(B,\) pues esto implica que \(A \cdot B = 0.\)
Teorema 4 (Desigualdad de Cauchy–Schwarz) Si \(A\) y \(B\) son dos vectores de \(\mathbb{R}^2,\) entonces,
\[ (A \cdot B)^2 \leq \vert \vert A \vert \vert^2 \, \vert \vert B \vert \vert^2. \]
Prueba. Sean \(A = (a_1, a_2)\) y \(B = (b_1, b_2).\) Para cualquier número real \(\alpha\) se verifica que:
\[ 0 \leq (a_1 - \alpha b_1)^2 + (a_2 - \alpha b_2)^2 = \vert \vert A \vert \vert^2 - 2 \alpha A \cdot B + \alpha^2 \vert \vert B \vert \vert^2. \]
Si \(\vert \vert B \vert \vert = 0\) entonces por la propiedad 1. del Teorema 2 se tiene que \(b_i = 0\) para \(i = 1,2,\) y la desigualdad se verifica de manera evidente.
Si \(\vert \vert B \vert \vert \neq 0\) tome \(\alpha = (A \cdot B)/ \vert \vert B \vert \vert^2,\) y al remplazar en la desigualdad anterior se tiene que:
\[ 0 \leq \vert \vert A \vert \vert^2 - 2 \frac{(A \cdot B)^2}{\vert \vert B \vert \vert^2} + \frac{(A \cdot B)^2}{\vert \vert B \vert \vert^2} = \vert \vert A \vert \vert^2 - \frac{(A \cdot B)^2}{\vert \vert B \vert \vert^2}, \]
lo que finaliza la prueba.
Otra manera de presentar la desigualdad de Cauchy–Schwarz, con \(A\) y \(B\) vectores de \(\mathbb{R}^2,\) es
\[ \vert A \cdot B \vert \leq \vert \vert A \vert \vert \, \vert \vert B \vert \vert. \]
Corolario 1 (Desigualdad Triangular) Si \(A\) y \(B\) son dos vectores de \(\mathbb{R}^2,\) entonces
\[ \vert \vert A + B \vert \vert \leq \vert \vert A \vert \vert + \vert \vert B \vert \vert. \]
Prueba. \[ \vert \vert A + B \vert \vert^2 = (A + B)\cdot (A + B) = \vert \vert A \vert \vert^2 + 2 A \cdot B + \vert \vert B \vert \vert^2, \]
al aplicar la desigualdad de Cauchy–Schwarz a esta 'ultima expresi'on se obtiene:
\[ \vert \vert A + B \vert \vert^2 \leq \vert \vert A \vert \vert^2 + 2 \vert \vert A \vert \vert \, \vert \vert B \vert \vert + \vert \vert B \vert \vert^2 = ( \vert \vert A \vert \vert + \vert \vert B \vert \vert)^2 \]
lo que finaliza la prueba.
Las medidas que se pueden encontrar en el triángulo de vértices \(P,\) \(Q\) y \(R,\) son equivalentes a las medidas presentes en el triángulo de vértices \(\mathcal{O},\) \(A\) y \(B\) en donde \(\mathcal{O} = P - P,\) \(A = Q - P\) y \(B = R - P.\)
Por otro lado, si encontramos un punto \(H\) asociado al triángulo \(\triangle \mathcal{O} A B,\) este puede ser enviado al punto \(H'\) en el triángulo \(\triangle P Q R,\) haciendo \(H ' = H + P.\)
Centros de triángulos
Definición 20 (Mediana de una triángulo) Una mediana de un triángulo es el segmento de recta que une un vértice con el punto medio del lado opuesto. Las tres medianas de un triángulo se cortan en un punto interior al mismo llamado baricentro, que a lo largo del documento denotaremos \(B_C\)
Ejemplo 10 (Baricentro de un triángulo) Encuentre el baricentro del triángulo \(\triangle ABC.\)
Considere los vectores \(P = B - A\) y \(Q = C - A.\) Estos son los vértices del triángulo \(\triangle \mathcal{O}PQ\) resultado de trasladar el triángulo \(\triangle ABC\) de manera que el punto \(A\) sea ahora el origen de coordenadas.
Note que el baricentro del triángulo \(\triangle \mathcal{O}PQ\) es aquel en donde los segmentos
\[ \frac{r}{2}(P + Q) \quad \text{ y } \quad (1 - t)P + \frac{t}{2}Q \quad \text{ con } r, s \in [0,1] \]
coinciden.
Al igualar ambas expresiones obtenemos
\[ \frac{r}{2}(P + Q) = (1 - t)P + \frac{t}{2}Q, \]
con lo que \(r = t\) y \(\dfrac{r}{2} = 1 - r\). De acuerdo con esto \(r = \dfrac{2}{3}.\)
El análisis análisis anterior muestra que el baricentro del triángulo \(\triangle \mathcal{O}PQ\) está localizado en el punto \(\dfrac{1}{3}(P + Q)\). Trasladando ahora la información obtenida al triángulo \(\triangle ABC\) obtenemos
\[ B_C = \dfrac{1}{3}(B - A + C - A) + A \]
en conclusión, el baricentro del triángulo \(\triangle ABC\) se encuentra localizado en el punto
\[ B_C = \dfrac{1}{3}(A + B + C). \]
Definición 21 (Incentro) La bisectriz de un ángulo es el segmento con origen en el vértice del ángulo que lo divide en dos ángulos de igual medida. Las tres bisectrices de un triángulo se cortan en un punto llamado incentro, que a lo largo del documento denotaremos con \(I_C.\)
Teorema 5 Considere dos vectores \(P\) y \(Q\) no paralelos, y sea \(R\) un vector tal que
\[ \frac{P \cdot R}{(P - Q) \cdot R} = \frac{\vert \vert P \vert \vert}{\vert \vert P - Q \vert \vert} \tag{3}\]
entonces el vector
\[ u = \vert \vert P \vert \vert (P - Q) - \vert \vert P - Q \vert \vert P, \tag{4}\]
es perpendicular a \(R.\)
Prueba. En efecto, note que
\[ \begin{align*} u \cdot R & = \vert \vert P \vert \vert (P - Q) \cdot C - \vert \vert P - Q \vert \vert P \cdot R \\ & = \vert \vert P \vert \vert (P - Q) \cdot R - \vert \vert P - Q \vert \vert \frac{\vert \vert P \vert \vert}{\vert \vert P - B \vert \vert} (P - Q) \cdot R \\ & = 0. \end{align*} \]
Es importante mencionar que el vector \(R\) en este Teorema es la bisectriz del ángulo comprendido entre los vectores \(P\) y \(P - Q\). Este vector \(R\) se podría en la forma \(P - rQ\) para alguna constante \(r\) y por lo tanto \(u \cdot (P - rQ) = 0\), con lo que
\[ r = \frac{u \cdot P}{ u \cdot Q} \]
De manera equivalente si \(R\) fuese la bisectriz del ángulo comprendido entre \(Q\) y \(Q - P\) entonces \(R\) se podría escribir en la forma \(Q - sP\) para alguna constante \(s\) en donde
\[ s = \frac{v \cdot Q}{v \cdot P} \]
aquí
\[ v = \vert \vert Q \vert \vert (Q - P) - \vert \vert Q - P \vert \vert Q, \tag{5}\]
El punto de corte de estas dos bisectrices será el incentro \(Ic\) del triángulo \(\triangle \mathcal{O} PQ\). Busquemos entonces constantes \(h\) y \(k\) ambas entre \(0\) y \(1\) tales que
\[ (1 - h)sP + hQ = (1 - k)rQ + kP, \]
es decir
\[ (1 - h)s = k \quad \text{ y } \quad h = (1 - k)r \]
con lo que
\[ h = \frac{(1 - s)r}{1 - rs}, \]
y esto implica que el incentro del triángulo \(\triangle \mathcal{O} P Q\) es
\[ I_C = \frac{(1 - r)s}{1 - rs}P + \frac{(1 - s)r}{1 - rs}Q. \]
De acuerdo con estas observaciones obtenemos el siguiente Teorema
Teorema 6 (Incentro de un triángulo) El incentro del triángulo \(\triangle ABC\) es \[ I_C = \frac{1}{1 - s r} \left[ (1 - s)(1 - r) A + (1 - r)sB + (1 - s)rC \right] \]